A team from NASA’s Jet Propulsion Laboratory (JPL) is in the final of a competition which aims to demonstrate multi-robot autonomy in a series of extreme environment tests.
Sponsored by the Defense Advanced Research Projects Agency (DARPA), the event marks the final contest in the Subterranean (SubT) Challenge, which began three years ago attracting engineers from around the world. The challenge is aimed at developing autonomous robotic solutions for first responders in underground environments where GPS and direct communications are unavailable.
Featuring eight teams, with dozens of robots, from more than 30 institutions, including NASA’s JPL, the event will culminate in a former Kentucky limestone mine. Between 21 – 24 September the teams will participate in a series of complex underground scenarios. The goal is to demonstrate cutting-edge robotic autonomy capabilities and compete for the chance to win US$2m (£146.7m).
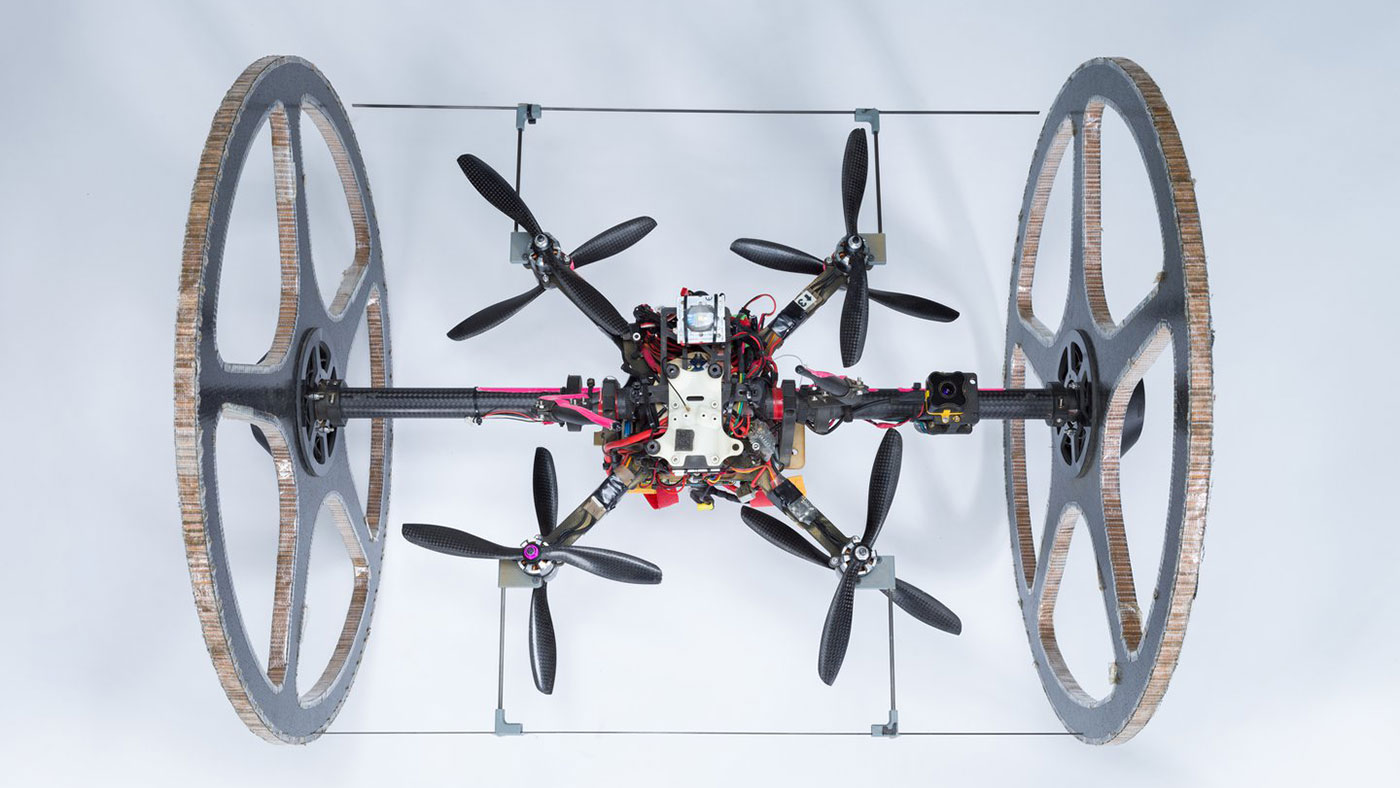
The technologies developed for the SubT Challenge and extreme-environment exploration on Earth also have direct applications for space exploration. The JPL-led Team CoSTAR (Collaborative SubTerranean Autonomous Robots) will demonstrate their collection of driving, walking, and flying robots that could one day be used to explore extreme terrains on the surface as well as inside the caves and lava tubes on other worlds without human assistance.
“Our focus in SubT is not the competition. Rather, this is an incredible opportunity to expedite the technology development and develop new autonomy and AI capabilities for NASA and for the good of humanity,” said Ali Agha, a JPL roboticist and the principal investigator for Team CoSTAR.
“In particular, when it comes to NASA’s quest in searching for life beyond Earth, the NeBula autonomy and AI technologies we develop by participating in this competition can be used in the future by robots that may explore extreme and challenging locations on other worlds where signs of extinct and extant life may be found.”
This week’s final event, held in the 4-million-square-foot (370,000-square-meter) Louisville Mega Cavern, features a combination of cave systems with irregular passages and large caverns to subsurface structures with complex layouts that reach several stories high.
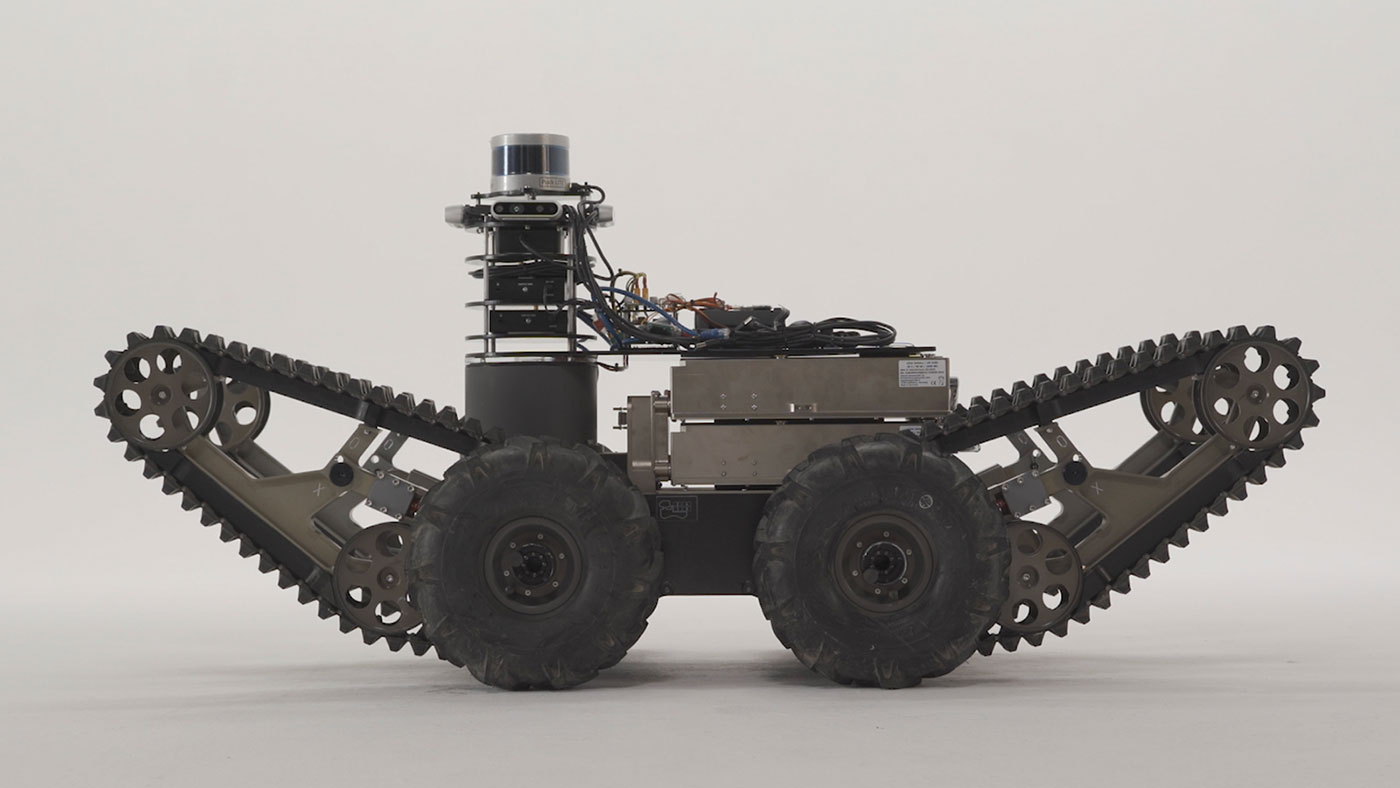
Team CoSTAR will rely on a diverse array of robots to fulfil the mission goals. The will first send in robot scouts to explore the environment, then select a subset of robots best able to collectively satisfy the overall mission goals depending on their mode of locomotion.
“The final contest will be particularly challenging, since we must use wheeled, legged, and flying robots to access all of the complex spaces that DARPA will build into the competition. I am excited to see how our very diverse robot team will perform,” said Joel Burdick, a Caltech professor and JPL research scientist.
The robots will also produce a live 3D map as they locate objects that represent a disaster-response and search-and-rescue scenario, such as manikins (to simulate human survivors), mobile phones, and backpacks distributed throughout a large environment.
Also present will be environment-specific artefacts, such as a carbon-dioxide-emitting source that mimics a gas leak in an urban setting. The team of robots must operate autonomously, for the most part, with no or limited radio contact with a single human supervisor, and the mission must be completed in one hour. The more objects they can traverse to, reach, identify, and precisely locate, the more points earned.






